StereoComplex
Robust ChArUco calibration and ray-based stereo reconstruction
From robust ChArUco observations to central and non-central ray-based stereo calibration.
StereoComplex is a lightweight Python toolkit for robust stereo calibration and ray-based 3D reconstruction. It starts from practical ChArUco workflows: detect corners, run a robust Ray2D planar refinement, compare raw OpenCV against refined observations, and export OpenCV-ready data.
It also includes experimental 3D ray-based calibration backends: a central ray-field stereo model and a non-central Zernike origin-field model where each pixel maps to a 3D line rather than to a ray emitted from a fixed pinhole center.
Video 1 (overview)
Motivation: in many practical stereo systems, calibration accuracy is limited by 2D localization quality (blur, compression, noise), and in some optical systems the pinhole/central-camera assumption itself is too restrictive.
Key contributions
Robust ChArUco refinement without requiring a camera model. Ray2D /
rayfield_tps_robustuses a homography plus a smooth residual field on the board plane.OpenCV-compatible stereo calibration diagnostics. StereoComplex compares raw and refined ChArUco points and reports stereo/reconstruction metrics.
Central 3D ray-field reconstruction. The central backend learns a compact pixel-to-ray direction model and triangulates from rays.
Experimental non-central stereo calibration. The non-central backend fits a Zernike origin field
O(u,v), so each pixel defines a 3D line instead of sharing one optical center.Synthetic non-central oracle benchmark. An inclined parallel-plate model generates physically plausible non-central stereo data without fitting plate parameters.
Practical non-central image workflow. A public experimental API fits a Zernike origin-field model directly from two image folders.
Ray-space optical model selection. A measured Zernike rayfield can be used to compare compact physical hypotheses such as central Brown-Conrady, inclined plate, and CMO polynomial-channel models.
Ray-field terminology
Term |
Meaning |
Dimension |
Status |
|---|---|---|---|
Ray2D / planar ray-field |
Homography + smooth residual field on the calibration board plane |
2D |
stable practical preprocessing |
Central 3D ray-field |
Pixel → 3D direction, shared camera center |
3D central |
experimental |
Non-central 3D rayfield |
Pixel → 3D line |
3D non-central |
experimental |
The 2D Ray2D refinement is not itself a 3D non-central camera model. It improves the image observations fed to calibration. The non-central backend is a separate 3D line-based model.
Engineering footprint: no ROS, no Docker requirement, no C++ toolchain; the core is a Python package using standard scientific libraries.

Fig. 1 Same GT (with geometric distortion) on a strict ideal render (top: no blur/no noise, nearest texture sampling) vs realistic (bottom), raw vs ray-field.
Key result: 3D ray-field robustness to compression
StereoComplex includes an experimental 3D ray-based stereo reconstruction prototype. On the provided compression sweep, the 3D ray-field remains stable under lossy compression, while pinhole-based pipelines remain sensitive to codec artifacts through the 2D localization stage.
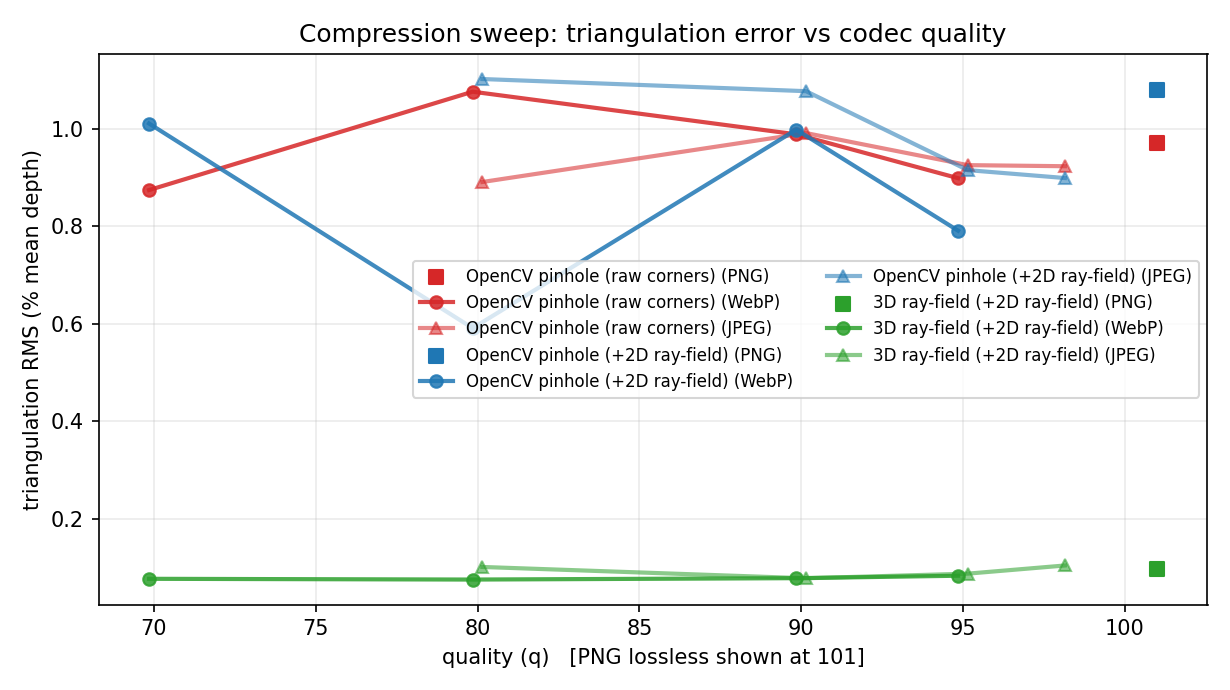
Fig. 2 Compression sweep: triangulation RMS (relative depth error) vs codec quality, comparing pinhole-based pipelines to the 3D ray-field.
Key result: non-central rendered-image benchmark
On the inclined-plate benchmark, raw OpenCV ChArUco detections impose a high reconstruction floor. With Ray2D-refined observations, the same non-central BA reaches sub-millimetric reconstruction accuracy:
OpenCV raw: central RMS ≈ 4.21 mm, oracle-detected RMS ≈ 3.44 mm, non-central BA RMS ≈ 3.36 mm.
Ray2D refined: central RMS ≈ 2.50 mm, oracle-detected RMS ≈ 0.76 mm, non-central BA RMS ≈ 0.66 mm.
Interpretation: the non-central model works when the 2D observations are good enough; front-end quality is the limiting factor on rendered or real images.
Status of the non-central backend
The non-central Zernike origin-field backend is experimental. It is useful for controlled benchmarks and for testing systems where the central-camera assumption is visibly biased.
Current limitations: it requires several diverse board poses, is sensitive to 2D detection quality, needs more data for higher Zernike orders, and the practical API currently exposes the origin-field model first. The full O(u,v), d(u,v), poses, rig BA is documented as an advanced benchmark path; train/test pose splits and support-aware rayfield metrics should be checked before claiming deployment-grade calibration.
Quickstart (what most users want)
If you already have your own stereo folders and want a central ray-based model, use:
from pathlib import Path
import stereocomplex as sc
board = sc.CharucoBoardSpec(
squares_x=11,
squares_y=7,
square_size_mm=39.0713,
marker_size_mm=27.3499,
aruco_dictionary="DICT_4X4_1000",
)
result = sc.fit_stereo_central_rayfield_from_image_dirs(
left_dir=Path("my_data/left"),
right_dir=Path("my_data/right"),
board=board,
method2d="rayfield_tps_robust",
export_model_dir=Path("models/my_calibration"),
)
For a non-central origin-field model from image folders, use:
from pathlib import Path
import stereocomplex as sc
board = sc.CharucoBoardSpec(
squares_x=9,
squares_y=6,
square_size_mm=20.0,
marker_size_mm=15.0,
aruco_dictionary="DICT_4X4_50",
)
fit = sc.fit_stereo_zernike_origin_field_from_image_dirs(
left_dir=Path("my_data/left"),
right_dir=Path("my_data/right"),
board=board,
max_order=4,
method2d="rayfield_tps_robust",
)
Refine corners (exports JSON + an OpenCV-ready NPZ):
.venv/bin/python -m stereocomplex.cli refine-corners dataset/v0_png \
--split train --scene scene_0000 \
--method rayfield_tps_robust \
--out-json paper/tables/refined_corners_scene0000.json \
--out-npz paper/tables/refined_corners_scene0000_opencv.npz
Run the reproducible OpenCV evaluation (raw vs ray-field) on the same scene:
.venv/bin/python paper/experiments/compare_opencv_calibration_rayfield.py dataset/v0_png \
--split train --scene scene_0000 \
--out paper/tables/opencv_calibration_rayfield.json
Notebook walkthroughs
If you want a guided, visual introduction before reading the code or the paper, start with the notebook series:
01_ray2d_vs_opencv.ipynb compares raw OpenCV detections against the 2D planar refinement (rayfield_tps_robust) on the synthetic benchmark.
02_ray3d.ipynb explains the compact central 3D ray-field, the Pycaso-style sweeps, and the compression robustness experiments.
03_rayfield_virtual_rectification.ipynb shows how to reuse a calibrated ray-field inside a classical dense stereo pipeline via virtual rectification.
04_parallel_plate_origin_field.ipynb demonstrates the inclined-plate non-central oracle, rendered ChArUco images with vignetting/blur/noise, and the complete non-central bundle adjustment over
O(u,v),d(u,v), poses, and the stereo rig.05_noncentral_calibration_from_images.ipynb shows the practical image-folder workflow: left/right images plus a ChArUco board definition to a fitted non-central Zernike origin-field model.
06_cmo_model_selection.ipynb demonstrates CMO rayfield measurement and optical model selection: ChArUco CMO generation, generic Zernike
O,dfields, then BIC selection among pinhole, Brown, plate, and CMO candidates.
Companion .py exports are stored next to the notebooks for quick inspection in any text editor.
Also: 3D reconstruction without a pinhole model (prototype)
StereoComplex also includes a ray-based stereo reconstruction prototype: it calibrates a compact mapping
pixel → ray direction (Zernike basis) using a point↔ray bundle adjustment over multiple planar poses
(no solvePnP, no known K), then triangulates from the two rays.
.venv/bin/python paper/experiments/calibrate_central_rayfield3d_from_images.py dataset/v0_png \
--split train --scene scene_0000 --max-frames 5 \
--method2d rayfield_tps_robust \
--nmax 10 --lam-coeff 1e-3 --outer-iters 3 \
--out paper/tables/rayfield3d_ba_scene0000.json \
--export-model models/scene0000_rayfield3d
Documentation map
Getting started: Start Here, Bring your own data, Non-central stereo calibration from image folders, Fix my calibration (OpenCV + ChArUco), Notebook walkthroughs.
ChArUco and 2D refinement: ChArUco: 2D identification strategy (baseline), Worked example: raw OpenCV ChArUco vs a ray-field second pass (errors + plots).
Ray-based calibration and reconstruction: Stereo 3D reconstruction (OpenCV) and the impact of the ray-field, Reconstruction API (load model, triangulate points, optional image maps), 3D ray-field (central) and ray-based calibration, Virtual rectification for dense stereo.
Optical model identification and scientific benchmarks: Identify My Optics, Physical CMO Model, Inclined parallel-plate oracle and Zernike origin-field identification, Optical model selection — CMO workflow and classification matrix, Pycaso-style depth sweep vs 3D ray-field, Image compression and 3D reconstruction, Robustness sweep (board size, focal length, aberrations).
Reference: Public API contract, Architecture, Dataset specification (v0), Conventions, Alternatives and positioning, Documentation license (CC BY-SA 4.0).